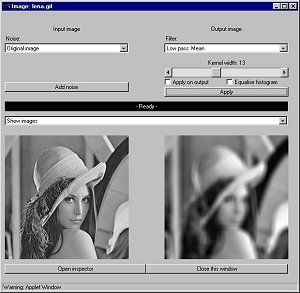
Linear filtering: Low- and High-pass filters

The
first choice is a mean filter, which can be considered as a low-pass filter
in the frequency domain.
You can specify the size of the kernel. For example, a 3x3 kernel will
give:
1 |1 1 1|
- * |1 1 1|
9 |1 1 1|
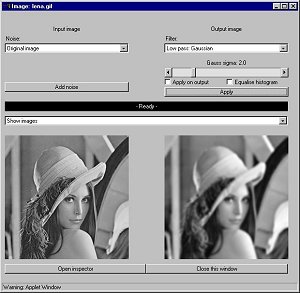
Gaussian filters are defined by their parameter sigma in the equation:
h(x,y) = exp[-(x2+y2)/(2*sigma2)]
Increased value of sigma will augment the low-pass effect.
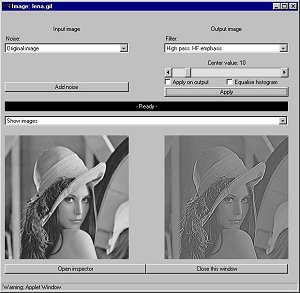
A high-pass filter can be defined by the kernel
|-1 -1 -1|
|-1 c -1|, c>=8
|-1 -1 -1|
Increasing the value of c will decrease the high pass effect, as the center
coefficient will dominate.
![]()
![]()